The first use case application is a combination of two complementary functionalities, namely the NGAP and the ADAS, aiming to provide accurate information on the tram position and assist drivers in critical situations by informing them in real-time on the presence of obstacles along the rail, thus enhancing the passengers’ and citizens’ safety.
The NGAP enables the accurate and real-time detection of the tram position along the rail through data collected only from on-board sensors: inertial measurement units (IMU), satellite positioning information (GNSS) and RADAR. The positioning information are estimated on-board of the tram and can be sent, through a reliable connection, to ground systems.
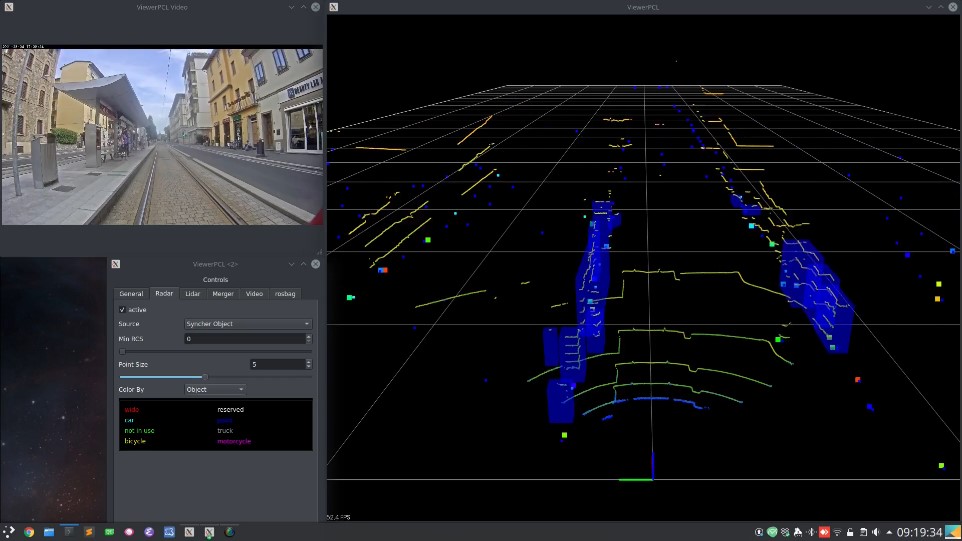
The ADAS implements the obstacle detection and collision avoidance functionalities based on an innovative data fusion algorithm, combining the outputs of multiple sensors including RADARs, cameras and Light Detection And Ranging (LiDAR) detectors. Data processing also includes complex algorithms for homography, data association, multi-target tracking, unscented Kalman filters and collision checking. Deep Neural Network methods are also applied, taking benefit of data collected by sensors installed on tram vehicle on service.
In ELASTIC, data from additional sources, such as fixed sensors placed at strategic positions (e.g., road crossings), has also been integrated to increase the reliability of the system