The ELASTIC coordinator and BSC researcher, Eduardo Quiñones, presents the project at the CIDAI AI & Big Data Congress 2021 that takes place physically in the AXA Auditorium in Barcelona, Spain, as well as online on 14-15 September 2021. The speech is part of the "Successful proofs of concept" session that is held online on 15 September at 15:15 CEST.
The talk is titled "ELASTIC: A novel software architecture for advanced mobility systems" and explains how the ELASTIC software architecture will form the technological basis for advanced mobility systems and autonomous transport networks, showcasing the ELASTIC framework and smart city use case.
The 14th and 15th of September 2021 will be held the 7th edition of the leading conference on AI & Big Data in the business sector, organized by CIDAI, Centre of Innovation for Data Tech and Artificial Intelligence. The first day will deliver live plus streaming sessions. Second day sessions will be fully online.
In this edition, we will enhance the content on Artificial Intelligence that is increasingly present and convergent. This year we will also offer strategy, technology and workshops.
The CIDAI AI & Big Data Congress is the meeting point for professionals, suppliers and companies that are developing or are carrying out projects in the field of AI & Big Data. A place to explain what is being done in Barcelona, Catalonia and what is being done in the world. The conference presents trends and best practices of pioneering companies, new technological developments and their application and success stories explained in detail.
Date
November 9th 2021 to November 10th 2021
Place
London, UK
The ELASTIC coordinator and BSC researcher Eduardo Quiñones is an invited speaker at the MOVE conference that takes place on 9-10 November 2021 in London, UK. Eduardo's speech is titled "The ELASTIC Project: assessing the technologies required to implement smart mobility" and is held on 9 November at 14:05.
Eduardo participates also in the panel discussion "Smart Traffic stream: Testing future traffic tech for sustainability" on the say day at 12:20 along with other experts in the field.
MOVE is the world's most important mobility event, where disruptive technology and innovation drive change. OEMs, transport operators, tech companies, energy companies, fast growing startups and policymakers gather every year to discover next generation technologies being brought into the marketplace. MOVE is their first port of call. Learn more and register here.
- Mon, September 13th 14:30
- Tue, September 14th 14:30
- Thu, September 16th 14:30
- Fri, September 17th 14:30
The course addresses the challenges of applying HPC task-based parallel programming models (e.g., OpenMP, COMPSs) for developing, deploying and efficient executing advanced CPS across the compute continuum. It focuses on the syntax and semantics of the task-based models, and presents the support needed by the compiler analysis and runtime to guarantee functional correctness and real-time requirements. Fine-grained and coarse-grained parallelisation strategies are considered as well. During the course, examples of advanced CPS from the automotive, smart mobility and large scientific infrastructures are presented through the use cases of the ELASTIC, CLASS, and AMPERE projects.
About ACACES
The ACACES Summer School is organized by the HiPEAC Network in collaboration with the TETRAMAX Innovation Action. ACACES 2021 is the seventeenth edition of the Summer School.
The ACACES Summer School is a one week summer school for computer architects and tool builders working in the field of high performance computer architecture and compilation for computing systems. The school aims at the dissemination of advanced scientific knowledge and the promotion of international contacts among scientists from academia and industry.
01 June 2021
Barcelona, 1 June 2021 - Smart trams are now running through the city of Florence in Italy, as part of the innovative computing infrastructure developed by the EU-funded project ELASTIC. A set of sensors has been recently installed on three tram vehicles of the public tramway system of Florence, while three tram stops are being equipped with sensing, computation and communication capabilities, paving the way to a next generation intelligent transport environment.
Nowadays, discussions about sustainability and urban population growth are leading to new approaches for effective mobility management in the cities. By enhancing the interaction between the city infrastructure, the public tram network and private vehicles, ELASTIC works towards an integrated, safe and smart urban mobility environment, which will lead to fewer accidents, efficient traffic management and reduced maintenance costs.
Bringing together scientific and industrial players as well as the local government and the Florence tramway operator, ELASTIC is developing functionalities aligned with the vision of autonomous trams, including:
· an advanced autonomous localization system, which provides real-time accurate positioning information even when GPS coverage is not available
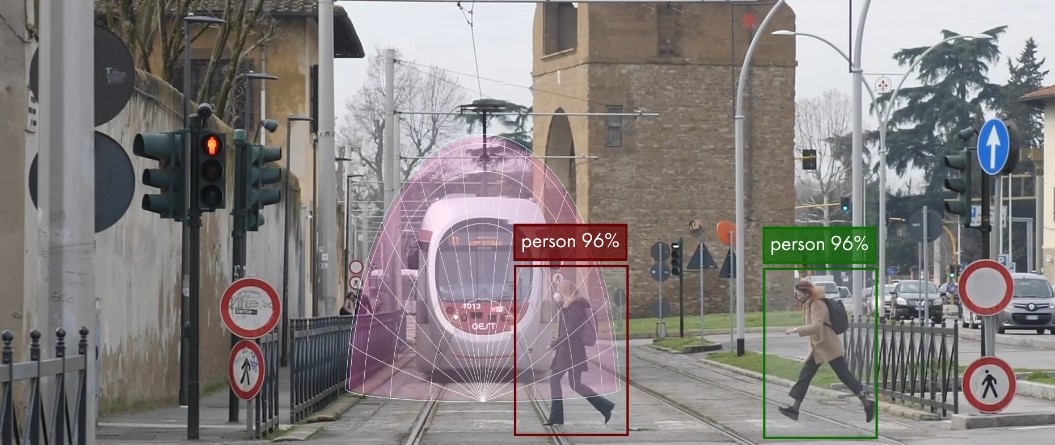
· the detection of hazardous situations in real-time to alert tram drivers and private vehicle drivers
Currently, three tram vehicles operating in the Florence network have been on-boarded with multiple sensors, such as cameras, Inertial Measurement Units (IMUs), Radar and Lidar, and are generating massive amounts of data during each journey. This data is fused with information extracted from sensors located in tram stops surroundings and processed through complex Artificial Intelligence (AI) methods. The next step involved the conversion of this information into valuable knowledge in real-time regarding the tram position, the presence of obstacles along the tram line and tram stops, and the movement of citizens and vehicles.
In that regard, the ELASTIC consortium is working towards the creation of smart areas around three key intersections between the tram lines, city streets, and pedestrian crossings in the Metropolitan City of Florence.
“Busy urban spaces are in need of innovative transport solutions and smart city applications. Forging ahead with the ELASTIC project, a high-end sensor-equipped system has been incorporated in the tram vehicles and soon at the tram stops of Florence collecting and aggregating significant figures of the performance of the transportation network", says Eduardo Quiñones, senior researcher at the Barcelona Supercomputing Center (BSC) and coordinator of ELASTIC. “This lays the basis for our next step: that of an active interaction between the vehicles and the city”.
About ELASTIC
ELASTIC (A Software Architecture for Extreme-ScaLe Big-Data AnalyticS in Fog CompuTIng ECosystems) is a European-funded project with a budget of €5.9 million, which started on 1 December 2018 and lasts for 3,5 years. Coordinated by the BSC, the project brings together a multidisciplinary consortium of stakeholders from smart mobility and research domain sectors: Barcelona Supercomputing Center (BSC, Spain), IKERLAN (Spain), Instituto Superior da Engenharia do Porto (ISEP, Portugal), Information Catalyst (ICE, UK), SixSq (Switzerland), Thales TRT (France), Thales Italia (Italy), Gestione ed Esercizio del Sistema Tranviario (GEST, Italy) and Città Metropolitana di Firenze (Italy).
The ELASTIC project has received funding from the European Union’s Horizon 2020 research and innovation programme under the grant agreement Nº 825473.
Our second Industrial Advisory Board (IAB) meeting has been completed proving once more to be a highly valuable asset in the project. During this meeting, all partners presented the current status of their technical work on: the Smart Mobility Use-cases, Distributed Data Analytics Platform, Fulfillment of the Non-Functional System Properties, Orchestration of the compute continuum - from edge to cloud, and Fog Computing Architecture, while IAB members provided their feedback on the progress of ELASTIC so far as well as recommendations for the future technical applications.
ELASTIC’s IAB consists of external experts in different industrial domains who support the project in various ways with their background and expertise in their corresponding domains. Their role is multifaceted: observing the project’s development, promoting the project through their networks and channels, and advising the consortium on technical requirements associated with the industry and application sectors.
During this middle phase of ELASTIC, the IAB oral and written feedback is an important resource of connecting the project with the industrial world and ever changing necessities of the different domains related to extreme-scale analytics and fog computing. Being up to date with the latest industry developments, the IAB members have offered useful input to the discussion around the issues that need to be addressed from an industry-based perspective.
Find out more about the ELASTIC IAB objectives and current members by visiting our dedicated page.
26 April 2021
Since the beginning of the ELASTIC project, we’ve made efforts to communicate our innovative work in an accessible manner. One of our ways to achieve this is to publish short news pieces on our website that explain our technology, written by the ELASTIC experts. Our articles range from pieces on the ELASTIC software architecture and Edge-to-Cloud infrastructure to our smart mobility use case in Florence and its autonomous tram applications. Browse our collection of technical articles and dive into the exciting ELASTIC universe!
ELASTIC is boosting the autonomous tram in Florence, by Gianluca Mandò (Thales Italia SpA). The tramway infrastructure in Florence, Italy, is ready to host the first tests of key technologies that will develop the autonomous tram in the near future.
Towards a distributed data analytics platform, by Cesar Marin (Information Catalyst) and Anna Queralt (BSC). ELASTIC is investigating two DDAP solutions for addressing data ingestion and storage.
Exploiting the computing capabilities along the compute continuum, by Maria A. Serrano (BSC). ELASTIC is developing a software architecture framework capable of efficiently exploiting the computing capabilities of the compute continuum, while guaranteeing the real-time, energy, communication quality and security non-function properties of the system.
Non-functional requirements in the ELASTIC architecture, by Luis Miguel Pinho (Polytechnic Institute of Porto). One of the main challenges to be tackled by ELASTIC is the necessity to fulfill the non-functional properties inherited from smart systems, such as real-time, energy efficiency, communication quality or security.
The elasticity concept in Fog Computing architectures, by Álvaro González Vila (IKERLAN Technology Research Centre, Basque Research and Technology Alliance - BRTA). The aim of ELASTIC is to obtain the best from the fog computing architecture and demonstrate its application on a smart mobility use-case scenario.
Data is King, but Information Rules, by Cristóvão Cordeiro (SixSq). Data needs processing, and this ever-increasing deluge raises new computing concerns with respect to: cost, network latency & reliability, and privacy. This is where ELASTIC's Edge-to-Cloud infrastructure comes into play.
Autonomous Tram Architectures, by Gianluca Mandò (Thales Italia SpA). The ELASTIC architectural vision of how an autonomous tram will work in a near future, when urban mobility paradigms will be considerably influenced by self-driving cars and other autonomous vehicles.
Don't miss our news updates, as more articles are coming your way every month - make sure you check our News page and social media accounts: Twitter and LinkedIn!
15 March 2021
Written by Gianluca Mando, Head of Products Design Authority, at Thales
Today, the process of digitizing transport systems is underway and the definition of the autonomous vehicle concept is part of this trend. However, given its internal complexity, it may sometimes not be immediately clear even to the most experienced of designers what are the main functional and technical elements that compose it. This technical news gives an architectural vision of how an autonomous tram will work in a near future, when urban mobility paradigms will be considerably influenced by self-driving cars and other autonomous vehicles.
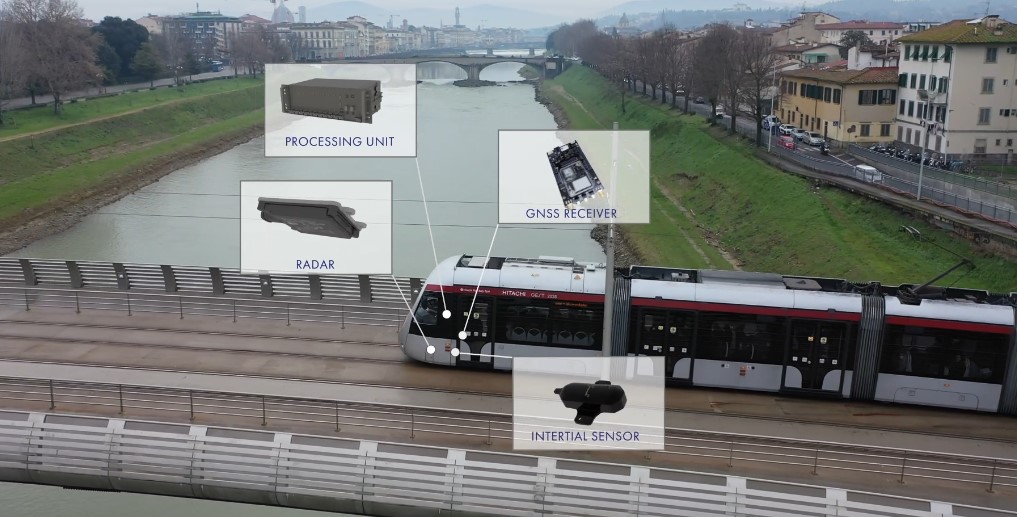
Here we want give an architectural vision of the autonomous tram as it has been conceived by Thales Italia in ELASTIC, where it has developed two important functions: the advanced autonomous localization system NGAP localization (Next Generation Autonomous Positioning) and the obstacle detection and avoidance functionality ADAS (Advanced Driver Assistance System). When a designer starts to describe a complex system as an autonomous tram, there are several options as the system can be viewed from different perspectives: in terms of physical components, development stages, logical functions or process steps. We consider two architectural viewpoints: 1) a technical, which is related to hardware and software components and their implementations, and 2) a functional, which includes the description of processing stages that a self-driving tram must have as logical blocks of the whole system.
Figure 1: NGAP sensors
Technical View
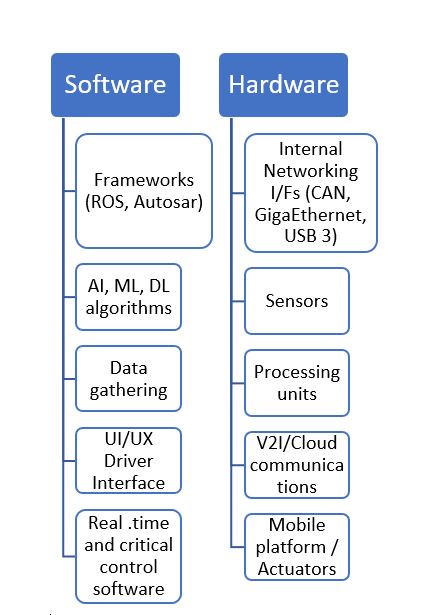
Hardware and software are the two main layers of the technical view of an autonomous tram architecture and each layer includes components that represent different aspects of the whole system. Some of these components can be seen as an isolated group, but there are some components that act like a backbone within their own layer providing a structure and guidelines for the interactions between all the components. This description is depicted in Figure 2.
Figure 2: Technical Architecture of an Autonomous Tram system
Future self-driving trams could be referred to as a high-performance computing (HPC) system on tracks because of the complexity in the hardware and software frameworks. They are large complex systems equipped with several sensors, for internal and external monitoring and generating massive amounts of data per journey. In order to handle all this information, communications and processing units are no longer limited to a set electronic control units but instead highly-parallel and heterogeneous edge devices are used to elaborate sensors data, featuring multi-core computing platforms with Graphical Processing Units (GPUs) and Field Programmable Gate Arrays (FPGAs) acceleration devices. In addition to the data generated by the vehicle, in ELASTIC external data is also available from the cloud vehiculated by train-to-ground Vehicle-to-Infrastructure communications (V2I). The tram vehicle itself is part of the hardware view: this is the mobile platform and actuators.
The internal networking interfaces allow each subsystem to exchange information with each other, for example high bandwidth interfaces like USB 3.x, Gigabit Ethernet for sensor data transport, or CAN networks for low bandwidth communication are used in the prototypes installed on-board the trams in Florence.
The software side is also currently evolving, with a strong transition from embedded software running on top of Real-Time Operating Systems (RTOS), to high-level software components including frameworks, libraries and modules that support Artificial Intelligence (AI) methods such as Deep Learning (DL) algorithms required for processing the data. But also, there are software components dealing with different aspects of the vehicle operation, like drivers for data collection from the sensors, user interfacing through the infotainment system, and real-time and critical software for controlling actuators and monitoring the status of the vehicle. Besides, the software frameworks and standards provide a structured way for the software to operate in a concurrent and cooperative way.
One example of software guidelines and frameworks, adopted on the trams in Florence in ELASTIC, is the Robot Operating System (ROS) a well-established software framework providing tools and libraries for autonomy applications.
Figure 3: ADAS sensors integrated in the vehicle
Functional View
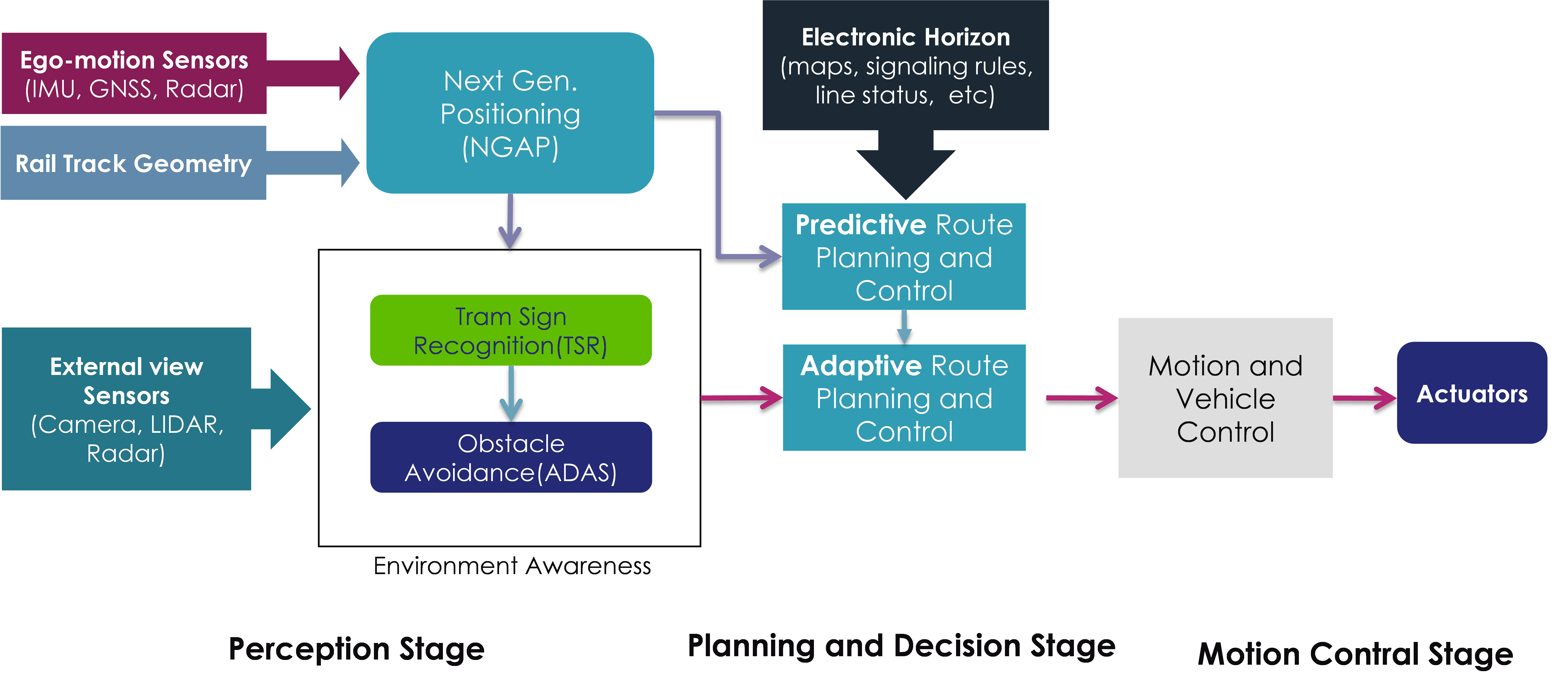
By analysing an Autonomous Tram from the functional perspective, logical or functional blocks are defined based on the flow of information and the processing stages performed from sensors data to the control of the tram. Considering this, three main functional stages can be identified: perception, planning and decision and motion control. These blocks are represented in Figure 4.
Figure 4: Functional Architecture of an Autonomous Tram system
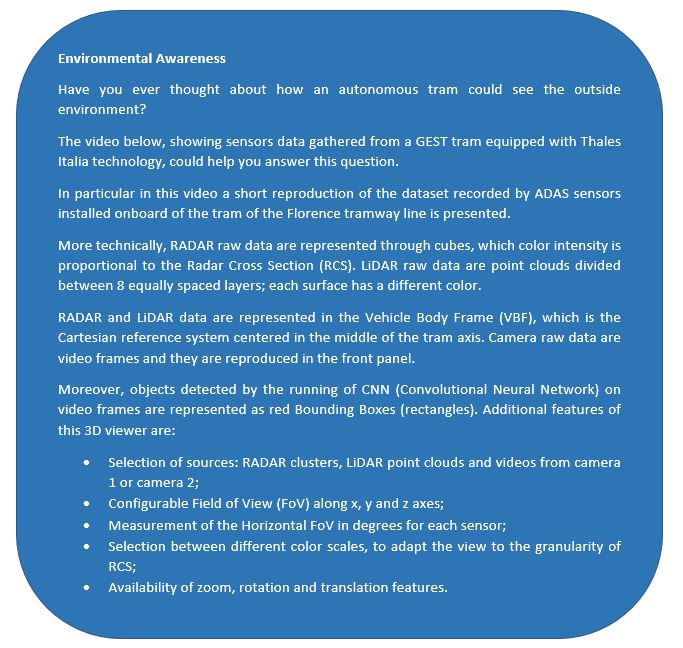
The perception stage is in charge for receiving data from sensors, and create the vehicle status and a world model representation. For performing these two tasks, sensors are categorized into ego-motion sensors that perceive and analyse tram kinematics and are used for sensing the vehicle state, like Global Navigation Satellite Systems (GNSS), Inertial Measurement Units (IMUs), Inertial Navigation Systems (INS), and Tachometers/Odometers. External-view sensors, like cameras, LIDARs, radars and ultrasonic sensors, monitor the environment surrounding the tram to obtain data of the track line and external objects. Localisation NGAP and environment awareness are the main functions performed after collecting all the incoming data from the sensors (see focus on Environment Awareness below). Environment awareness in turn contains two other important functions for the autonomous tram: tram signal aspect recognition and obstacle avoidance (ADAS).
Once the tram and external world status are available for the planning and decision stage, the system can start the navigation plan for the train, like a short-term route from point A to point B approaching a tramway junction area. Adaptive vehicle control is included in this stage to implement the safe operation of the tram.
Furthermore, the predictive vehicle control block supports the planning and decision stage by extending the scope of the adaptive control function by calculating tram’s future dynamics by using data (like maps, signalling rules, provisional speed limits, etc) in the electronic horizon.
The stage of motion control stage manages the way in which the trajectory and control strategy generated in the previous stage is executed on the platform, considering the configuration, track geometry and limitations of it. Again, this stage is highly associated with safety features as it receives high priority commands from the reactive behaviour modules to modify or stop the movement of the tram.
Another key block of this architecture is the functions supervision which is in charge of monitoring all the aspects of the vehicle like the hardware (sensors operation, degraded information, processes performance, energy management, faults management , etc) and the software (autonomy software stack, data values plausibility, etc). The importance of these tasks is that, as a safety-critical system, malfunctioning of hardware or software in a self-driving vehicle, should not result in any harm to people, environment or property. The IEC 50128, 50126 and 50129 are a set of standards for functional safety in railway to address possible hazards arising from faults in electric or electronic devices in a train.
Watch the video below:
03 March 2021
ELASTIC has been selected by the European Commission’s (EC) Innovation Radar among the most innovative EU projects. Specifically, two innovations coming out of the ELASTIC research were assessed by the Joint Research Centre’s Market Creation Potential indicator framework as to be addressing the needs of existing markets and existing customers and as actively exploring value creation opportunities.
Only EU-funded innovations from high-quality projects have the opportunity to feature in this platform, which helps make the technologies visible and accessible to the public.
The innovation entries of ELASTIC are the following:
The Innovation Radar is an EC initiative to identify high potential innovations and innovators in EU-funded research and innovation projects. Its main goal is to allow every citizen, public official, professional and business person to discover the outputs of EU innovation funding and give them a chance to seek out innovators.
By providing greater access to such information, the platform hopes to encourage the development of a dynamic ecosystem of incubators, entrepreneurs, funding agencies and investors that can help get EU-funded innovations faster to market.
In recent years many great EU-funded innovations identified by the Innovation Radar have also been championed as part of the Innovation Radar prize scheme.
08 February 2021
As the pandemic is still ongoing around the world, online meetings and events have become the norm. Following this, the ELASTIC consortium had just completed the latest digital F2F project meeting, which took place on 2-4 February. Representatives from all partners came together for the 3-day gathering to update each other on developments in the technical and non-technical tasks.
The first day was purely dedicated to the work of the technical Work Packages. The discussion kicked off with the smart mobility use case with the related partners explaining their latest work on the tram network of Florence. Later on, the focus shifted towards the advances in the software architecture, which included presentations on the ELASTIC distributed data analytics platform, non-functional system properties, and fog computing architecture.
The second day started with sessions on the non-technical Work Packages during which the partners had the opportunity to hear what the dissemination, exploitation, and project management teams have been up to. The day went on with technical discussions on more specific technical issues, such as the data model interoperability and validation of the software architecture components and data analytics methods. These in-depth conversations were carried on the next and final day of the meeting, as clarifications on certain points were needed between the team members.
Thanks to all our partners for joining our meeting and contributing to the progress of the ELASTIC project. Until next time!
11 January 2021
2020 has been a year of lessons to learn. Speaking from the side of the ELASTIC project, it has been a year of adaptation and progress, despite the difficult circumstances during the pandemic. At the beginning of the new year, it is always a good exercise to reflect on what was achieved in the previous year in order to be able to look ahead.
In this spirit, we summarise the 2020 highlights of our project below:
In January 2020, we celebrated our last physical F2F meeting in beautiful Arrasate, Spain, at the premises of our partner IKERLAN. During the 3-day gathering, the partners had the opportunity to discuss the latest developments of the project and collect useful feedback from the Industrial Advisory Board members.
In April 2020, we started our Women in STEM interview series, which we are particularly proud of. Our female colleagues in ELASTIC have shared with us their experiences as women in STEM as well as insights about their work in the project.
In May 2020, we launched our first project video along with a dedicated Press Release. The video demonstrates the ELASTIC novel software architecture for extreme-scale analytics and shows how this technology will be tested in a real smart mobility use case deployed on the tram network of Florence.
In November 2020, we took part in Smart City Live 2020, the key event in the field of smart cities and urban spaces. ELASTIC along with the European project CLASS were selected by the Generalitat de Catalunya as joint participants in the novel Tomorrow.Radar online platform set up by the event organisers.
In the same month, we organised a parallel session at the European Big Data Value Forum 2020. Thanks to our panelists and attendees, the session gave a holistic overview of the project’s work towards a next generation mobility system and received a lot of attention and positive feedback.
Stay tuned for our activities in 2021, as we look forward to more events, collaborations, and technical advancement!